
Deep Learning for Resources and Environments
Applied research focusing on applying machine learning and deep learning for resource and environmental modelling
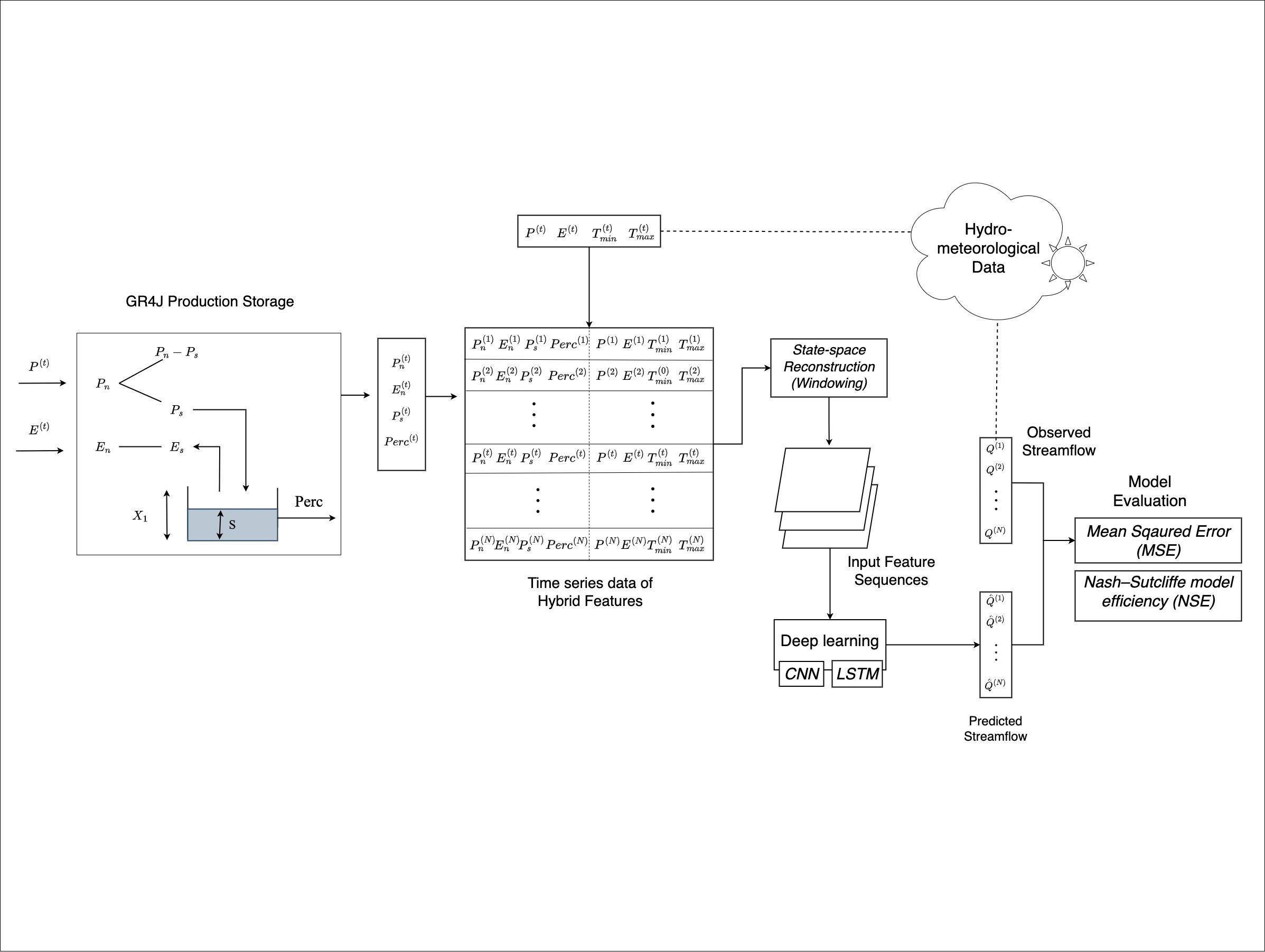 DeepGR4J
DeepGR4J
A synergy of Conceptual hydrological model GR4J and Convolutional Neural Network (CNN) and Long Short-term Memory (LSTM) neural networks for improved prediction performance in streamflow prediction tasks..
Code Paper
Bayesian Machine Learning
Various implementations of Markov Chain Monte Carlo Schemes for training Bayesian Neural Networks and other machine learning models.
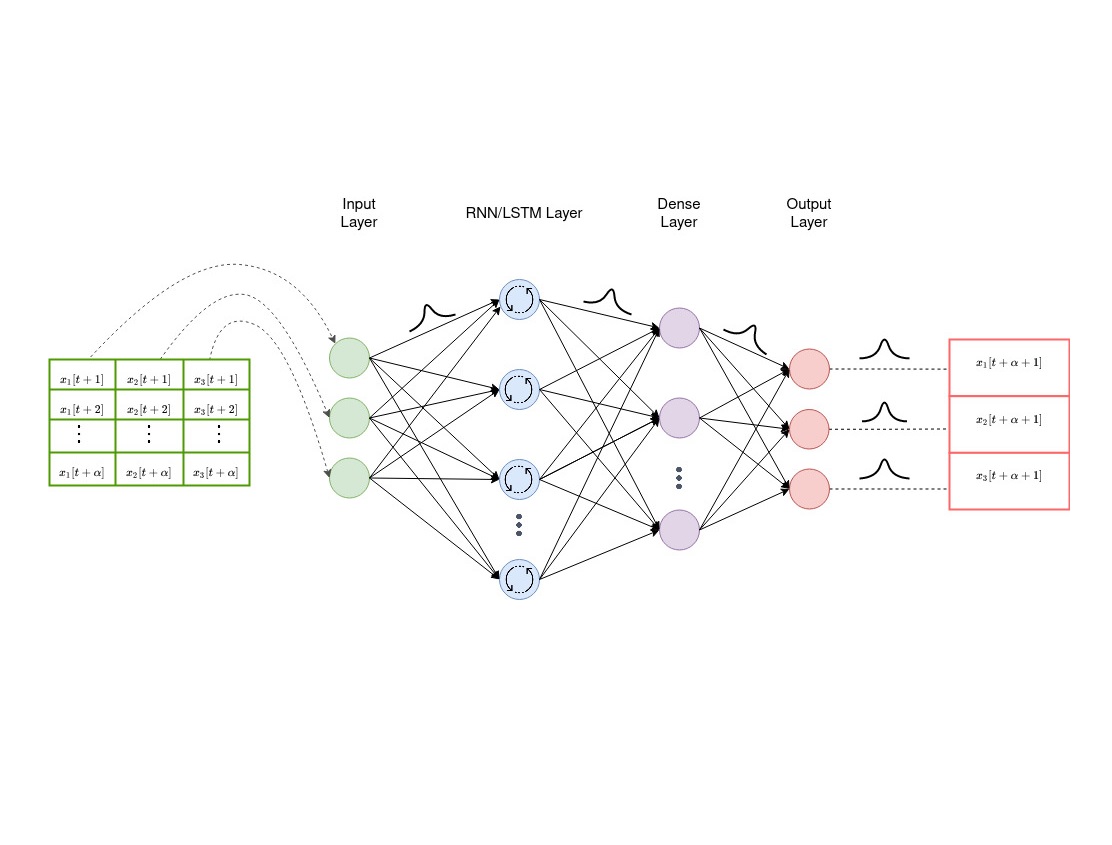 Variational Recurrent Neural Networks (VaRNN)
Variational Recurrent Neural Networks (VaRNN)
VaRNN provides implementation of Variational Bayes algorithm (inspired by bayes-by-backprop) for RNN models including Long Short-term Memory models. We apply these models for prediction of cyclone tracks and intensities in data provided by Joint Typhoon Warning Center (JTWC).
Code Paper Presentation
 Parallel Tempering for Bayesian Neuroevolution
Parallel Tempering for Bayesian Neuroevolution
The proven effectiveness of neuroevolution in Deep Learning (here) is the motivation behind this project. This project investigates the effectiveness of multi-core implementation of parallel MCMC for population based Bayesian neuroevolution in pattern classification and time series problems.
Code Paper
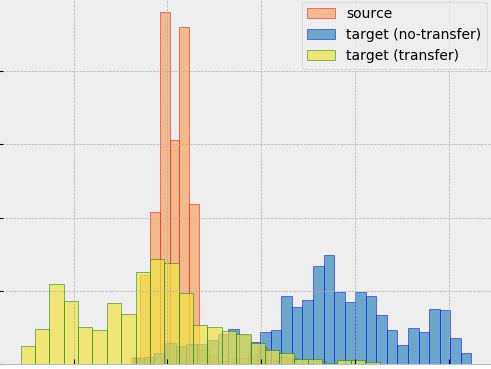 Bayesian Neural Transfer Learning
Bayesian Neural Transfer Learning
Quantify uncertainity in Tranfer Learning with Bayesian Neural Networks trained via Markov Chain Monte Carlo
Code Paper
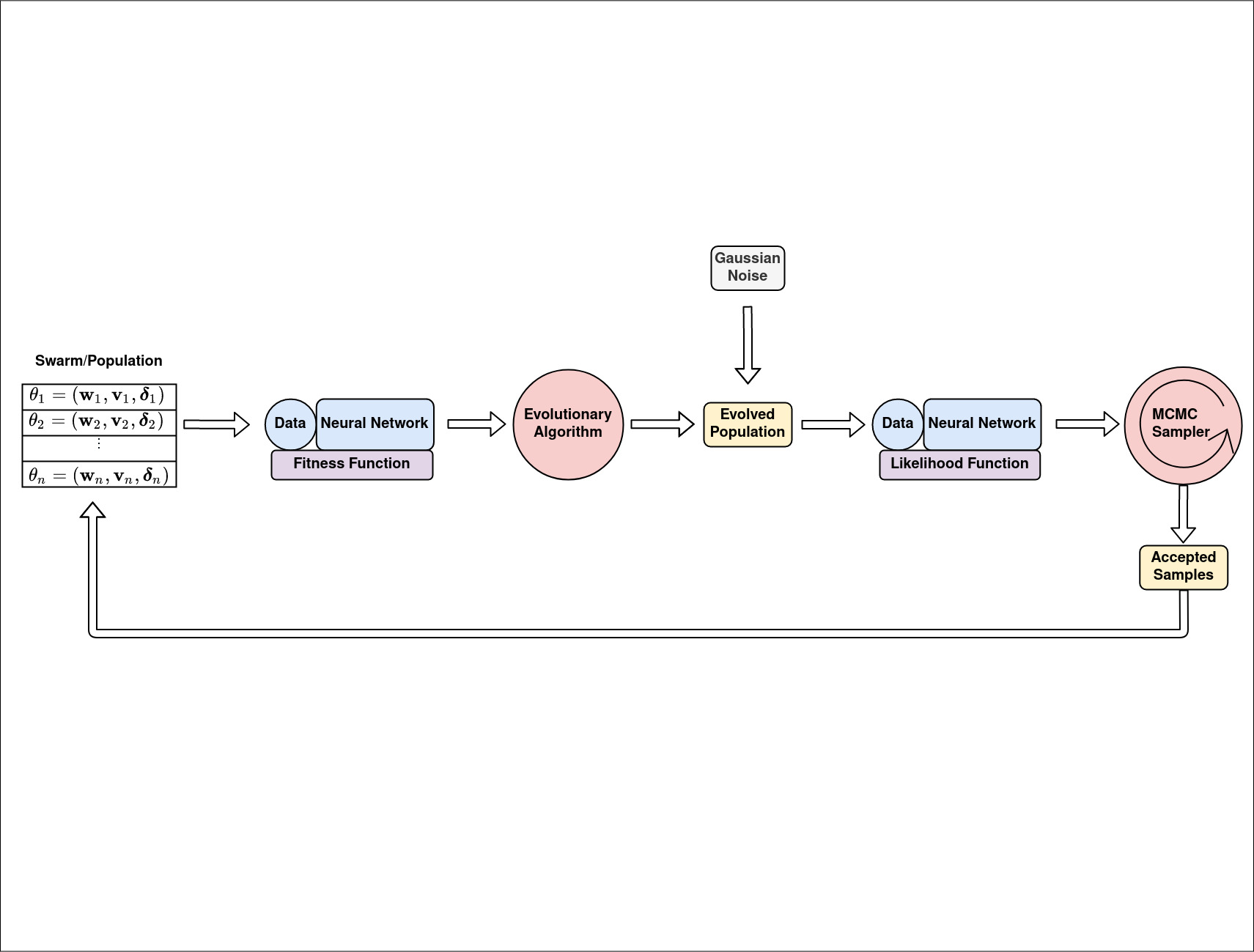
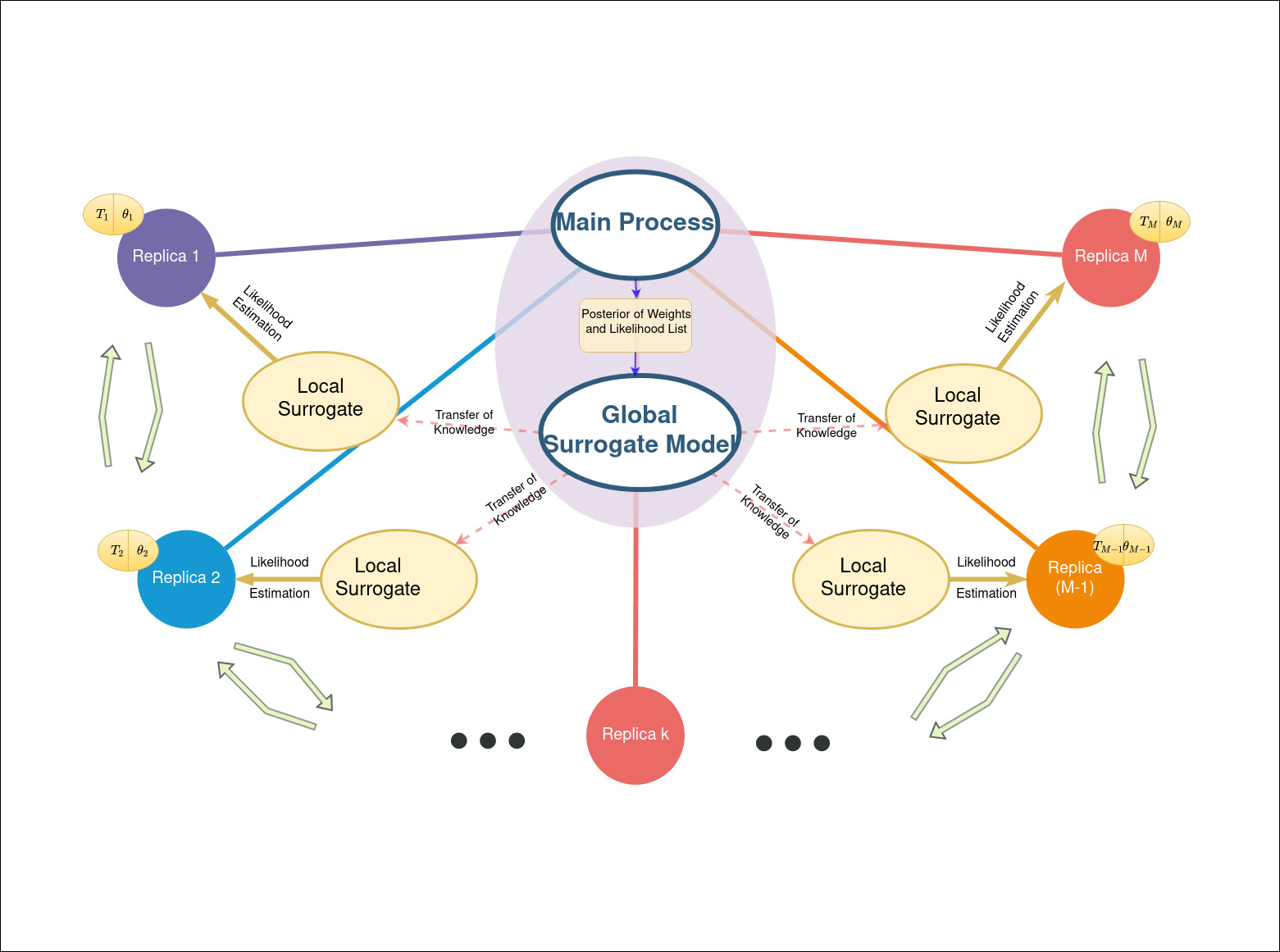 Surrogate-assisted Parallel Tempering for Bayesian Neural Networks
Surrogate-assisted Parallel Tempering for Bayesian Neural Networks
We use surrogate model to estimate the computationally expensive objective functions in Parallel Tempering to reduce the overall runtime of the MCMC sampling.
Code Paper
 Surrogate-assisted Parallel Tempering Bayeslands
Surrogate-assisted Parallel Tempering Bayeslands
Surrogate-assited tempered MCMC algorithm for parallelized Bayesian inference for parameters of a landscape topography evolution model called Badlands
Code Paper
Humanoid Robotics
Humanoid Teleoperation
This project involves a Kinect 360 motion sensor to capture human motions and imitation by the humanoid robot with legged motion
Tic-Tac-Toe Playing Humanoid
A humanoid robot capable of playing tic-tac-toe against and human opponent, powered by the minimax algorithm.
Self Balancing Humanoid
Humanoid capable of self balancing on unstable surfaces like a suspension bridge
Undergraduate Final Year Thesis
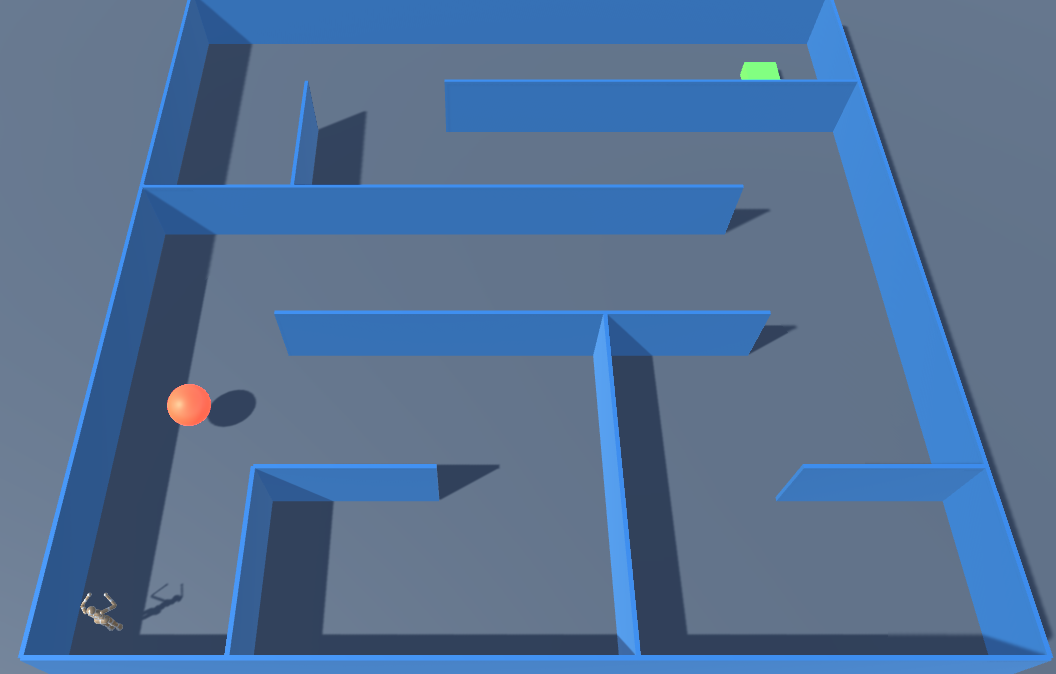 Humanoid Maze Solver using Deep Reinforcement Learning
Humanoid Maze Solver using Deep Reinforcement Learning
A Heirarchical Reinforcement learning inspired approach used to teach a higher order task (solving a maze) to a humanoid. The approach consists of two policies: a higher level maze solver policy, and a lower level Humanoid mobility policy. The simulation was generated in a MuJoCo environment.
Software Packages
Pynamixel
Python module written on top of DynamixelSDK to provide convinient interface with Robotis Dynamixel Smart Robotic Actuators
Code
ROS Dynamixel
Robot Operating System (ROS) package that provides a ROS Message interface to interact with Dynamixel Actuators
Code